Los nuevos rovers de la NASA serán una flota de robots móviles que trabajarán juntos en la superficie lunar y marciana
Seguro que estarás pensado que uno de los rovers podría llegar a fallar en el caso de que se sumerja debajo de lava, ¿verdad? He de decirte que podría mandar la información a los otros miembros de su grupo para que la misión pudiese continuar.
3 minutos de lectura
Actualizado: 24 de Julio, 2025, 03:13 AM
Publicado: 07 de Noviembre, 2021, 10:11 AM
Escuchar el artículo
Compartir:
Redacción Internacional.- La NASA ha empezado a trabajar en una flota de mini-rovers que pueden operar de manera conjunta para resolver problemas y tomar decisiones como una única unidad, es decir, el resto no podrá seguir si uno de ellos deja de funcionar por un error.
Esta innovación pertenece al proyecto ‘Cooperative Autonomous Distributed Robotic Exploration’, CADRE por sus silgas, mientras que en español significa ‘Exploración Robótica distribuida Autónoma Cooperativa’. Los ingenieros de la NASA están diseñando estos robots para explorar de forma autónoma la Luna y otros planetas, además, trabajarán de manera conjunta para recopilar aquellos datos que sean complicados de obtener.
Se espera que las primeras pruebas se realicen en unos enormes tubos de lava de la Luna, concretamente en áreas donde la capa superior se haya solidificado, pero aún siga fluyendo por debajo. Para ver los resultados de esta misión tendremos que esperar un par de años antes de que dichos robots sean lanzados en un módulo de aterrizaje a la superficie de la Luna.
Seguro que estarás pensado que uno de los rovers podría llegar a fallar en el caso de que se sumerja debajo de lava, ¿verdad? He de decirte que podría mandar la información a los otros miembros de su grupo para que la misión pudiese continuar.
La NASA quiere que estos robots puedan conducir por cualquier superficie sin presentar inconvenientes. Con el fin de cumplir con los objetivos, cada uno llevará un ordenador pequeño, una radio inalámbrica y una cámara estéreo para hacer fotografías en 3D.
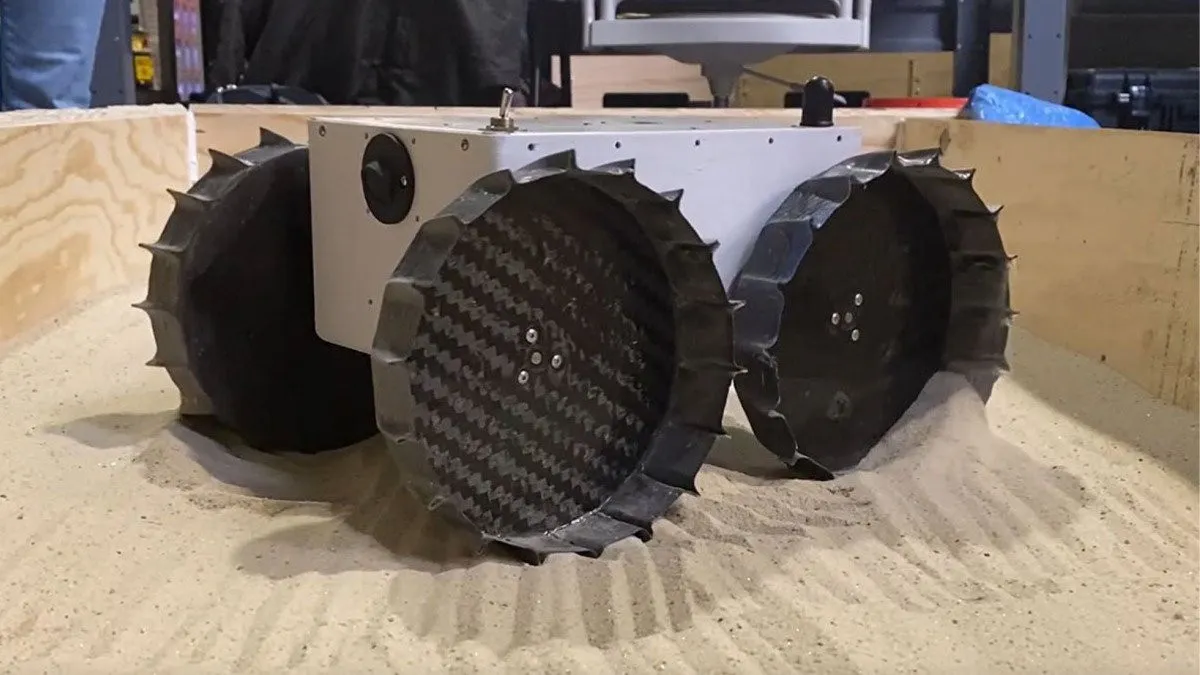
Los investigadores del Laboratorio de Operaciones Lunares Simuladas (SLOPE) están colaborando en el proyecto para evitar que estos rovers se queden atascados en plena misión, para comprobarlo, han empezado a similar los terrenos por donde navegarán -desde el suelo polvoriento de la Luna hasta la superficie rocosa de Marte-.
Para comprobar estas pruebas, están empleando una tecnología de captura de movimiento que incluye un par de cámaras estéreo para crear imágenes en 3D, de esta manera, se utilizarán para medir la velocidad de cada robot y el movimiento de los neumáticos para saber cómo podrían reaccionar a cada tipo de superficie.
LO MÁS LEÍDO
LO MÁS VISTO
TE PUEDE INTERERSAR